To get started, click on "Design My Pattern" to begin customizing your ChArUco pattern. If you have a ChArUco pattern in vector format, enter the finished size in inches (up to three decimal places) in the pricing tool, and then click "Get Started" to upload your artwork and view your digital proof. Please note that proofs may not accurately reflect the final print quality. Read More
This short video will show the defection of a ChAruco target board using OpenCV.
ChArUco Calibration Targets
High-accuracy ChArUco boards professionally printed for robotics, computer vision, and camera calibration—built for reliable detection and repeatable results.
ChArUco Boards Features

Vibrant UV Direct Printing

Precision Manufacturing
Understanding that vision systems depend on precise components, we have automated the cutting process in our facilities to ensure your calibration board delivers the most accurate results.

Custom Shapes, Drill Holes, and More
Our "Special" cut option offers fully modified board shapes. We provide unique custom shapes, specialized drill hole sizes, and specific placements. This option is ideal for creating cost-effective custom test targets or specialized parts for research and development. Learn More

Wide Range of Sizes
We offer a wide range of custom sizes for small and large fields of view, ranging from 4" x 4" to 48" x 96". There is a manufacturing tolerance of ±.004" in either direction.

Rounded Corners
Rounded Corners provide safety with sleek, professionally machined rounded edges for the corners of your calibration board.
Material Options
ACM – Technical Material Specs
ACM Material Specifications
Polyurethane – Technical Material Specs
Polyurethane Material Specifications
Consistent Contrast for Hybrid Calibration
(Ultra-Matte Finish · Near-Lambertian Surface on ACM)
All ChArUco targets are printed using our ultra-matte finish by default. When produced on ACM (Aluminum Composite Material), a full-coverage layer of UV-cured white ink creates near-Lambertian reflectance. This antireflective surface reduces specular highlights and uneven reflections, ensuring stable marker detection and accurate corner interpolation across varying lighting conditions.
This is particularly beneficial for hybrid ChArUco calibration workflows, where both marker detection and checkerboard corner accuracy are critical—especially in environments where lighting cannot be tightly controlled.
The UV-ink surface on ACM is scratch-resistant, long-lasting, and suitable for both indoor and outdoor calibration environments.
Helpful Ordering Tips
- Order the exact sizes that match your file's artboards; use the keyboard to add decimals if needed.
- Upload your custom files; vector PDF files are preferred for optimal print results.
- Full-scale files are required to avoid the files being scaled up or down to fit the image on the board's order size. Need a PDF for print? Try our Free Online Calibration Pattern Generator now!
- During the proofing process, always double-check and compare the file size to each board order size (Foamcoreprint.com is not responsible for artwork scaling if the incorrect board sizes are ordered and proofs are approved incorrectly).
- If you have questions about the artwork uploaded to an order, please call, email, or start a live chat before sending the art files to print. Production will begin within 10 minutes of the artwork being approved. Once production begins, we can not remove approved art files from the production line.

What Are Charuco Boards?
A charuco boards are a traditional chessboard pattern that incorporates makers in the empty white sections.
They aim to circumvent some of the shortcomings you may encounter with classical checkerboards. One thing to note is that the detection algorithm of a charuco board is pretty complicated.
Fortunately, the introduction of OpenCV 3.0,0 and its later versions empresses the charuco target detection. It is, therefore, straightforward to use and achieve the benefits charuco targets offer.
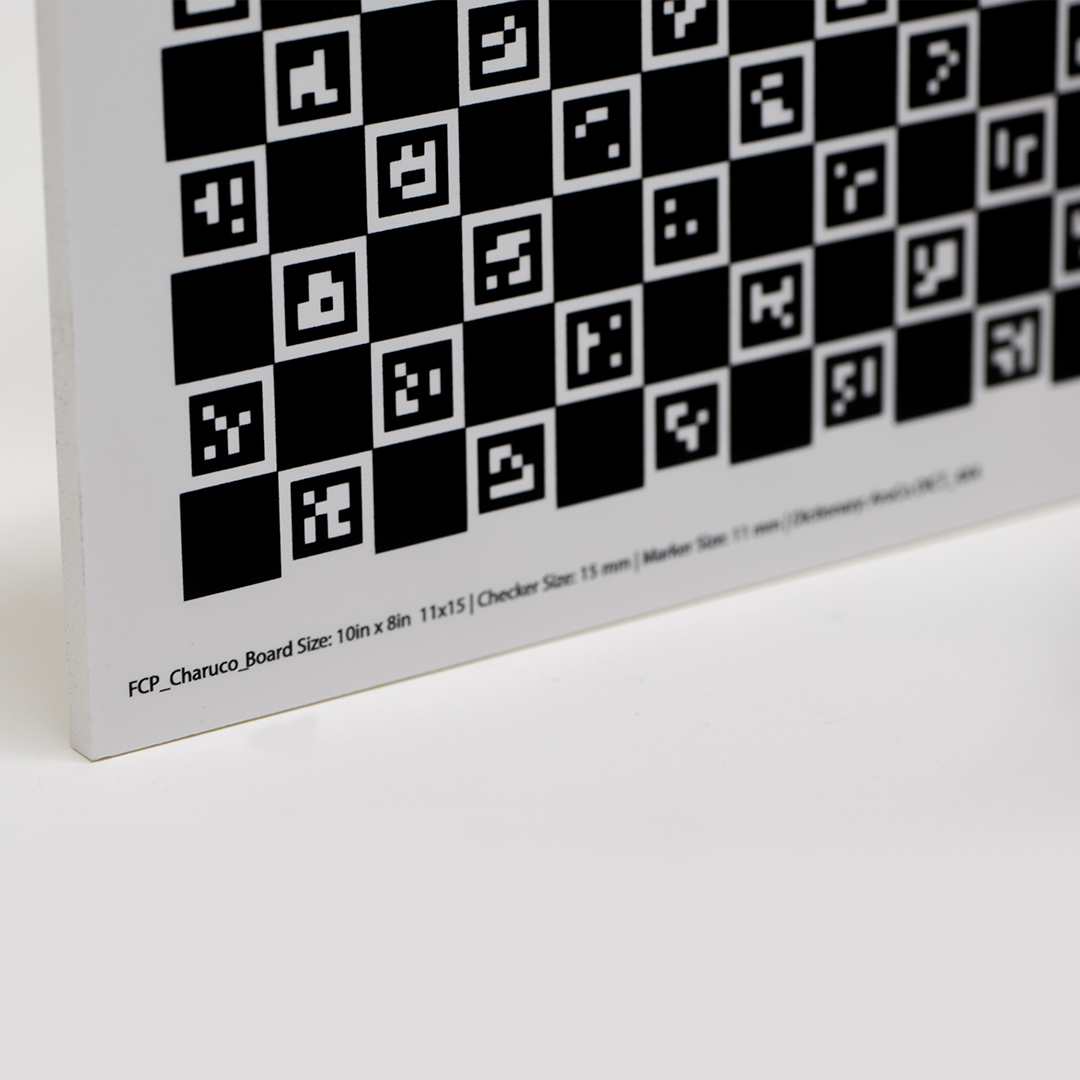
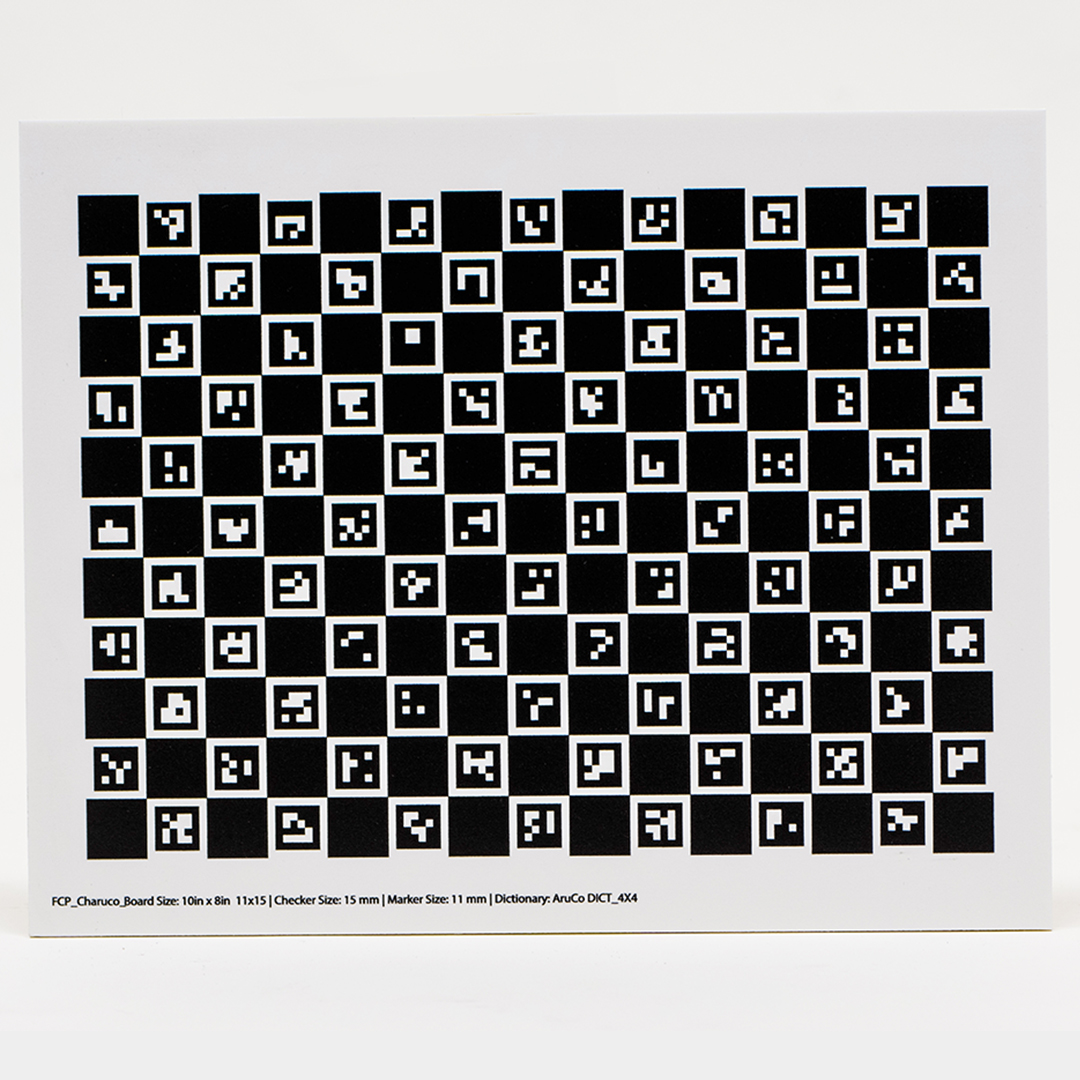
How Do Charuco Targets Look?
Charuco targets have specially encoded sections. For this reason, you can calibrate with a partially blocked or unsuitable target position. You can use software like like photo modeler and halcon to help.
Charuco targets enhance the protection against picture noise. Their properties permit capturing of data from the extreme peripheries of photos. Being able to get that much data ensures precision and robustness in identifying your lens’s parameters.
Moreover, the specific coding of attribute points enables you to perform stereo calibration where some edges may get partially obscured.

A Combination of Chessboard Targets and Aruco Targets
Charuco targets are a merge between checkerboard patterns and aruco targets and it goes without saying that charuco targets are one of many custom targets we provide.
Aruco boards and makers are essential because of their flexibility and ease of detection. However, one of the challenges users face with aruco targets is that the precision of the edges is not as high as desired.
Even if you try subpixel refinement of these corners, the outcome is still not as accurate as required.
Chessboard patterns are easier to fine-tune the corners, given each corner has two black squares. Unfortunately, the versatility of a chessboard target is not as extensive as that of an aruco target. When using the chessboard pattern, no omissions are acceptable, and your board should be entirely visible.
Charuco targets, therefore, combine both patterns to achieve the benefits of both of them.
The aruco areas aid in the interpolation of chessboard corner positions. This way, you can achieve the flexibility of aruco makers as they permit you to use them with some sections blocked from view.
What’s more, given the interpolated corners belong to chessboard patterns, they have high precision when it comes to subpixel accuracy.
So, when calibrating your camera or conducting other applications demanding a high degree of exactness, charuco boards offer a better option than both aruco and chessboard targets.
What are the Benefits of Charuco Targets?
The most significant advantage of charuco targets lies in the unique coding and identifiability of checker areas. Therefore, even partially obscured and unsuitable camera photos are usable in camera calibration.
For example, immense ring lights can result in the non-uniform exposure of your calibration target. That is, some sections experience semi-specular reflection, something that would fail checkerboard patterns.
When using a charuco target, however, the remaining visible saddle points are still adequate for camera calibration. With charuco targets, you can fine-tune the identification of saddle points with subpixel accuracy, as is the case with checkerboard patterns.
Data at the extreme peripheries of images is a very useful feature. Since you can position charuco targets to be partially visible to your camera, you can record observations from your camera images’ extreme corners and edges.
Access to this information often results in excellent and robust identification of your lens’s distortion parameters. So, when you have access to OpenCV 3.x, charuco targets are the best to use.
Charuco targets are typically applicable when calibrating several cameras, i.e. stereo calibration. During this process, you need to implement a code. This code should help you identify the points that each camera detected and the points of intersection detected by all cameras under calibration.
Creating the Charuco Board
OpenCV’s aruco module provides a constant function, cv::aruco::CharucoBoard::create(), that eases the charuco board creation process.
Here is a breakdown:
cv::aruco::CharucoBoard board = cv::aruco::CharucoBoard::create(5, 7, 0.04, 0.02, dictionary);
In which,
- 5 and 7 represent the number of squares in the horizontal and vertical axes, respectively
- 0.04 and 0.02 are dimensions of squares and makers
- Dictionary= makers’ dictionary
Though each maker’s ids (unique identifiers) get assigned by default; you can change them from board.ids. After obtaining your charuco board object, the next step is printing it.
Detecting a Charuco Board
Chessboard corners are essentially what you detect when detecting your charuco board. Each corner has its id beginning from zero to the number of corners in your charuco board.
- Detecting charuco boards begins with capturing the input image. This is the original image in which you’ll detect your makers. The images aid in charuco board subpixel corner refinement.
- Next is identifying your calibration parameters, a step that is not vital if you are detecting your charuco corners without calibrating.
- Maker detection followed by maker interpolation comes in next. During maker detection, parameters for detecting without calibration and when calibrating defer slightly. Nevertheless, the charuco corner detection function remains the same.
- cv::aruco::interpolateCornersCharuco().
Where calibration parameters are available, charuco targets' corners get interpolated in two steps.
- Aruco maker rough pose estimation
- Charuco corner reprojection to the input image
Without calibration parameters, the process involves calculating the tallying homography between your charuco image projection and the charuco plane.
The main issue with homography usage is the susceptibility of interpolation to image distortion. Homography only gets performed with closely positioned charuco corner makers to minimize distortion effects.
You should disable maker corner refinement during charuco board detection, especially when applying homography. This way, you prevent the subpixel process from providing corner position deviations given the closeness of checkerboard squares. The variations affect the interpolation of charuco corners resulting in poor outcomes.
Moreover, the only corners returned are those in which the two neighboring makers get found. Failure to detect the neighboring makers around a charuco corner denotes occlusion or poor observation quality within the region.
It’s best to ignore unreturned charuco corners to ensure high accuracy of interpolated ones. A subpixel refinement occurs upon the interpolation of charuco corners.
After charuco corner interpolation, the next step is drawing the corners to verify detection accuracy. You can do so using the drawDetectedCornersCharuco() function.
Pose Estimation with Charuco Boards
While pose estimating, position the charuco board coordinate system with its Z-axis pointing outwards and at the board’s bottom left corner.
The function to use is estimatePoseCharucoBoard(). You get true with correct pose estimation, and false if wrong. Leading reasons for a false outcome include:
- Inadequate number of charuco corners to facilitate the estimation process
- The charuco corners are in one line
Deep Charuco
The deep charuco pose estimation system aims to enable pose estimation in low-light conditions and blurred images. Deep charuco incorporates RefineNet and ChArUcoNet networks while combining them with PnP (Perspective-n-Point) algorithm for 6DoF maker pose estimation.
ChArUcoNet provides 2D point locations and ID-specific classifiers. RefineNet comes in to fine-tune the 2D point location into sub pixel coordinates.
What Size of Charuco Target Should I Use?
Once you pick charuco targets for calibration, identifying a suitable size is essential. The size of your charuco board relates to the dimensions of the FOV (field of view) of your last application. Considering this is vital as you need to focus your cameras on that particular distance as you calibrate.
Adjusting your focus distance though slightly, still impacts your focal length. As a result, the previous calibrations you performed will be valueless.
Even adjusting your lens aperture detrimentally affects the accuracy of your calibration, and you should therefore refrain from altering the f/stop.
To ensure calibration accuracy, ensure your charuco target occupies most of your camera image. If you decide to use a small charuco plate, multiple variations of camera parameters can account for the taken observations.
In short, the charuco board needs to occupy a minimum of half your camera’s pixel area in a frontal observation.
Reviews for ChArUco Targets
Rating
Frequently asked Questions
FAQ
YOU MAY ALSO LIKE
Notify on stock availability